EVOLUTION OF OUR ROBOT AND CHALLENGES OVERCOME










Motor was not producing rotational motion it was just vibrating.We concluded that power from battery was low.
We were unfamiliar with the kit so we read the building guide and bill of materials
We discovered an opening where balls may pass out so we used an extrusion to block path. Sweepers were used as a means of ball intake and dispensing.
Servo on robot could only make a 180 degrees rotation which not enough to pull out sliders in front so we decided to make servos continous for continued rotation
One arm on robot was not enough to raise robot off the ground as there was not enough power.
We decided to bulid 2 arms but hanging process was slow .
We decided to remove sliders in front to bring sliders as they were not crucial to reduce the mass and use a chain system which is much more efficient.
We used chains to transfer power from motor in back to front wheel and added gears so as to increase speed of sweepers. Colour sensors were added to differentiate between blue balls and orange balls and not dispense them in the water reserve
ARMS

The first arm design we thought of for hanging was linear sliders using a pulley system.

The second arm design was a rack and pinion system utilizing chains, we chose to use this system as it was much more efficient and no possibility of slips.
Ball intake
We decided to use sweeper to take in and dispense balls as it can take multiple balls at a time increasing its efficiency.
Team Nigeria's engineering notebook

We added wheels to sweepers to prevent balls from accidentally falling out.
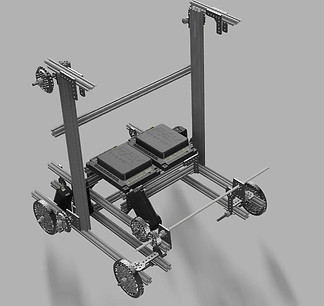
3D MODEL OF ROBOT